|
ros2_control - humble
|
Loading...
Searching...
No Matches
|
ros2_control - humble
|
#include <joint_limits_interface.hpp>
Public Member Functions | |
| JointSoftLimitsHandle (const hardware_interface::JointHandle &jposh, const hardware_interface::JointHandle &jcmdh, const JointLimits &limits, const SoftJointLimits &soft_limits) | |
| JointSoftLimitsHandle (const hardware_interface::JointHandle &jposh, const hardware_interface::JointHandle &jvelh, const hardware_interface::JointHandle &jcmdh, const JointLimits &limits, const SoftJointLimits &soft_limits) | |
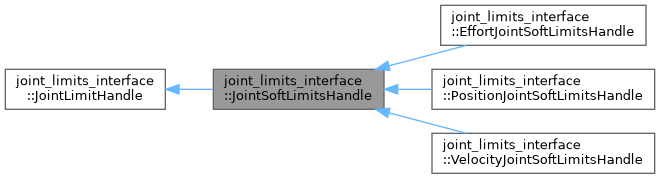
 Public Member Functions inherited from joint_limits_interface::JointLimitHandle Public Member Functions inherited from joint_limits_interface::JointLimitHandle | |
| JointLimitHandle (const hardware_interface::JointHandle &jposh, const hardware_interface::JointHandle &jcmdh, const JointLimits &limits) | |
| JointLimitHandle (const hardware_interface::JointHandle &jposh, const hardware_interface::JointHandle &jvelh, const hardware_interface::JointHandle &jcmdh, const JointLimits &limits) | |
| std::string | get_name () const |
| virtual void | enforce_limits (const rclcpp::Duration &period)=0 |
| Sub-class implementation of limit enforcing policy. | |
| virtual void | reset () |
| Clear stored state, causing it to reset next iteration. | |
Protected Attributes | |
| joint_limits_interface::SoftJointLimits | soft_limits_ |
| Protected Attributes inherited from joint_limits_interface::JointLimitHandle | |
| hardware_interface::JointHandle | jposh_ |
| hardware_interface::JointHandle | jvelh_ |
| hardware_interface::JointHandle | jcmdh_ |
| joint_limits_interface::JointLimits | limits_ |
| double | prev_pos_ |
| double | prev_vel_ |
Additional Inherited Members | |
| Protected Member Functions inherited from joint_limits_interface::JointLimitHandle | |
| double | get_velocity (const rclcpp::Duration &period) const |
| Return velocity for limit calculations. | |
The base class of limit handles for enforcing position, velocity, and effort limits of an effort-controlled joint that has soft-limits.