|
ros2_control - humble
|
Loading...
Searching...
No Matches
|
ros2_control - humble
|
Public Attributes | |
| std::string | name |
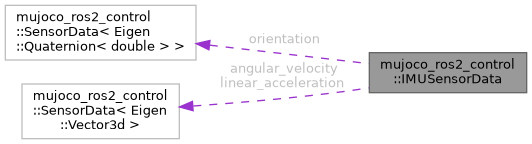
| SensorData< Eigen::Quaternion< double > > | orientation |
| SensorData< Eigen::Vector3d > | angular_velocity |
| SensorData< Eigen::Vector3d > | linear_acceleration |
| std::vector< double > | orientation_covariance |
| std::vector< double > | angular_velocity_covariance |
| std::vector< double > | linear_acceleration_covariance |