|
ros2_control - jazzy
|
Loading...
Searching...
No Matches
|
ros2_control - jazzy
|
Virtual base class for all hardware components (Actuators, Sensors, and Systems). More...
#include <hardware_component_interface.hpp>
Classes | |
| class | HardwareComponentInterfaceImpl |
Public Member Functions | |
| HardwareComponentInterface (const HardwareComponentInterface &other)=delete | |
| HardwareComponentInterface copy constructor is actively deleted. | |
| HardwareComponentInterface (HardwareComponentInterface &&other)=delete | |
| CallbackReturn | init (const HardwareInfo &hardware_info, rclcpp::Logger logger, rclcpp::node_interfaces::NodeClockInterface::SharedPtr clock_interface) |
| CallbackReturn | init (const HardwareInfo &hardware_info, rclcpp::Logger logger, rclcpp::Clock::SharedPtr clock) |
| CallbackReturn | init (const hardware_interface::HardwareComponentParams ¶ms) |
| virtual CallbackReturn | on_init (const HardwareInfo &hardware_info) |
| Initialization of the hardware interface from data parsed from the robot's URDF. | |
| virtual CallbackReturn | on_init (const hardware_interface::HardwareComponentInterfaceParams ¶ms) |
| Initialization of the hardware interface from data parsed from the robot's URDF. | |
| virtual rclcpp::NodeOptions | define_custom_node_options () const |
| Define custom node options for the hardware component interface. | |
| virtual std::vector< StateInterface > | export_state_interfaces () |
| Exports all state interfaces for this hardware interface. | |
| virtual std::vector< hardware_interface::InterfaceDescription > | export_unlisted_state_interface_descriptions () |
| virtual std::vector< StateInterface::ConstSharedPtr > | on_export_state_interfaces () |
| virtual std::vector< CommandInterface > | export_command_interfaces () |
| Exports all command interfaces for this hardware interface. | |
| virtual std::vector< hardware_interface::InterfaceDescription > | export_unlisted_command_interface_descriptions () |
| virtual std::vector< CommandInterface::SharedPtr > | on_export_command_interfaces () |
| virtual return_type | prepare_command_mode_switch (const std::vector< std::string > &start_interfaces, const std::vector< std::string > &stop_interfaces) |
| Prepare for a new command interface switch. | |
| virtual return_type | perform_command_mode_switch (const std::vector< std::string > &start_interfaces, const std::vector< std::string > &stop_interfaces) |
| HardwareComponentCycleStatus | trigger_read (const rclcpp::Time &time, const rclcpp::Duration &period) |
| Triggers the read method synchronously or asynchronously depending on the HardwareInfo. | |
| virtual return_type | read (const rclcpp::Time &time, const rclcpp::Duration &period)=0 |
| Read the current state values from the hardware. | |
| HardwareComponentCycleStatus | trigger_write (const rclcpp::Time &time, const rclcpp::Duration &period) |
| Triggers the write method synchronously or asynchronously depending on the HardwareInfo. | |
| virtual return_type | write (const rclcpp::Time &time, const rclcpp::Duration &period) |
| Write the current command values to the hardware. | |
| const std::string & | get_name () const |
| Get name of the hardware. | |
| const std::string & | get_group_name () const |
| Get name of the hardware group to which it belongs to. | |
| const rclcpp_lifecycle::State & | get_lifecycle_state () const |
| Get life-cycle state of the hardware. | |
| void | set_lifecycle_state (const rclcpp_lifecycle::State &new_state) |
| Set life-cycle state of the hardware. | |
| uint8_t | get_lifecycle_id () const |
| Get the lifecycle id of the hardware component interface. | |
| virtual bool | has_state (const std::string &interface_name) const |
| Does the state interface exist? | |
| virtual const StateInterface::SharedPtr & | get_state_interface_handle (const std::string &interface_name) const |
| Get the state interface handle. | |
| template<typename T > | |
| bool | set_state (const StateInterface::SharedPtr &interface_handle, const T &value, bool wait_until_set) |
| Set the value of a state interface. | |
| template<typename T > | |
| void | set_state (const std::string &interface_name, const T &value) |
| Set the value of a state interface. | |
| template<typename T > | |
| bool | get_state (const StateInterface::SharedPtr &interface_handle, T &state, bool wait_until_get) const |
| template<typename T = double> | |
| T | get_state (const std::string &interface_name) const |
| Get the value from a state interface. | |
| virtual bool | has_command (const std::string &interface_name) const |
| Does the command interface exist? | |
| virtual const CommandInterface::SharedPtr & | get_command_interface_handle (const std::string &interface_name) const |
| Get the command interface handle. | |
| template<typename T > | |
| bool | set_command (const CommandInterface::SharedPtr &interface_handle, const T &value, bool wait_until_set) |
| Set the value of a command interface. | |
| template<typename T > | |
| void | set_command (const std::string &interface_name, const T &value) |
| Set the value of a command interface. | |
| template<typename T > | |
| bool | get_command (const CommandInterface::SharedPtr &interface_handle, T &command, bool wait_until_get) const |
| template<typename T = double> | |
| T | get_command (const std::string &interface_name) const |
| Get the value from a command interface. | |
| virtual rclcpp::Logger | get_logger () const |
| Get the logger of the HardwareComponentInterface. | |
| virtual rclcpp::Clock::SharedPtr | get_clock () const |
| Get the clock. | |
| virtual rclcpp::Node::SharedPtr | get_node () const |
| Get the default node of the HardwareComponentInterface. | |
| const HardwareInfo & | get_hardware_info () const |
| Get the hardware info of the HardwareComponentInterface. | |
| void | pause_async_operations () |
| Pause any asynchronous operations. | |
| void | stop_async_handler () |
| Stop and release the async handler thread. | |
| void | prepare_for_activation () |
| Prepare for the activation of the hardware. | |
| void | enable_introspection (bool enable) |
| Enable or disable introspection of the hardware. | |
Protected Attributes | |
| HardwareInfo | info_ |
| std::unordered_map< std::string, InterfaceDescription > | joint_state_interfaces_ |
| std::unordered_map< std::string, InterfaceDescription > | joint_command_interfaces_ |
| std::unordered_map< std::string, InterfaceDescription > | sensor_state_interfaces_ |
| std::unordered_map< std::string, InterfaceDescription > | gpio_state_interfaces_ |
| std::unordered_map< std::string, InterfaceDescription > | gpio_command_interfaces_ |
| std::unordered_map< std::string, InterfaceDescription > | unlisted_state_interfaces_ |
| std::unordered_map< std::string, InterfaceDescription > | unlisted_command_interfaces_ |
| rclcpp_lifecycle::State | lifecycle_state_ |
| std::unique_ptr< realtime_tools::AsyncFunctionHandler< return_type > > | async_handler_ |
| std::vector< StateInterface::SharedPtr > | joint_states_ |
| std::vector< CommandInterface::SharedPtr > | joint_commands_ |
| std::vector< StateInterface::SharedPtr > | sensor_states_ |
| std::vector< StateInterface::SharedPtr > | gpio_states_ |
| std::vector< CommandInterface::SharedPtr > | gpio_commands_ |
| std::vector< StateInterface::SharedPtr > | unlisted_states_ |
| std::vector< CommandInterface::SharedPtr > | unlisted_commands_ |
| pal_statistics::RegistrationsRAII | stats_registrations_ |
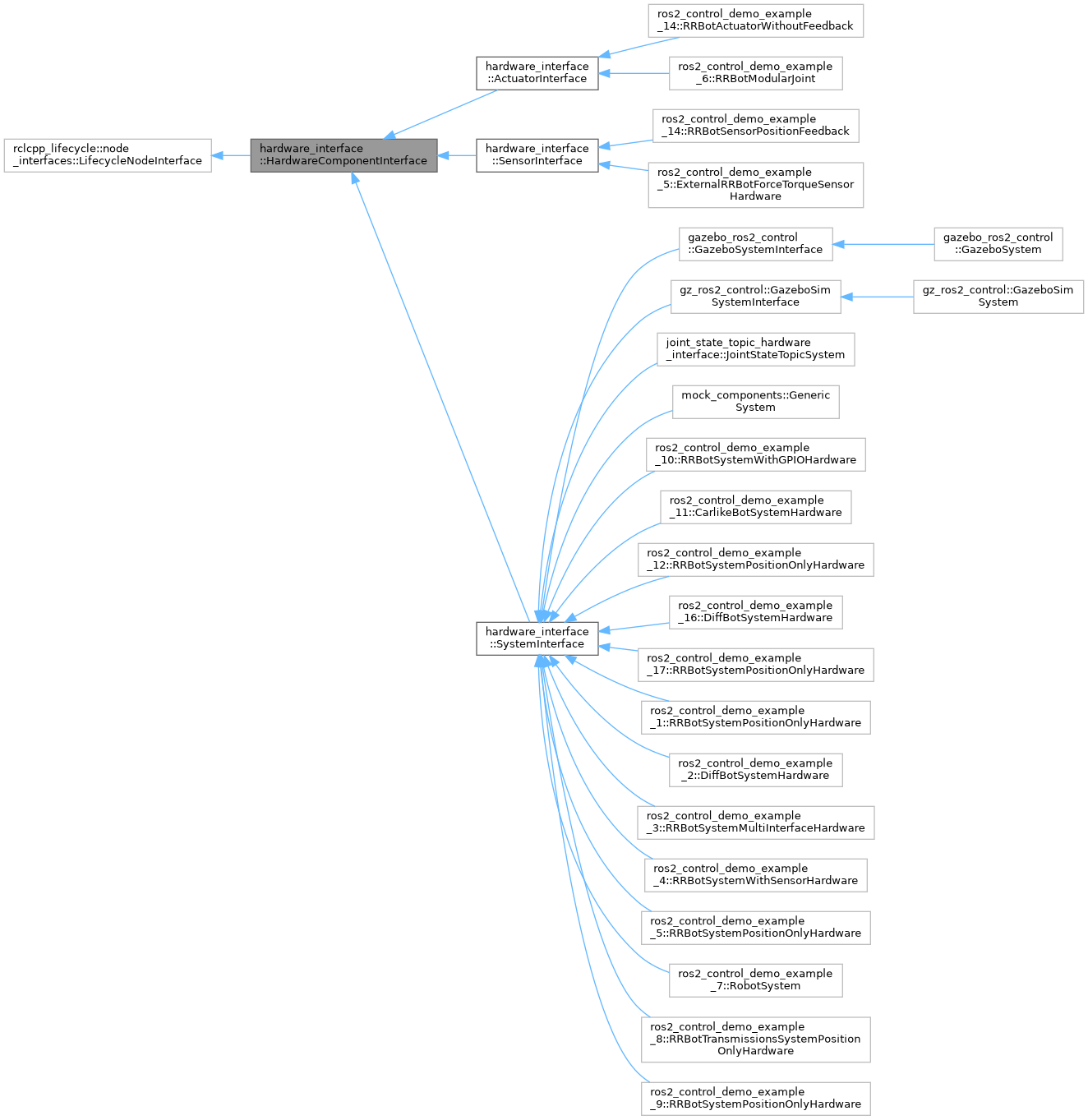
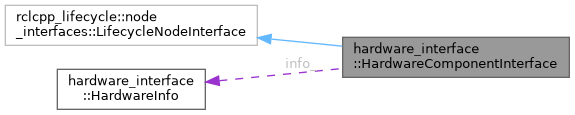
Virtual base class for all hardware components (Actuators, Sensors, and Systems).
This class provides the common structure and functionality for all hardware components, including lifecycle management, interface handling, and asynchronous support. Hardware plugins should inherit from one of its derivatives: ActuatorInterface, SensorInterface, or SystemInterface.
|
delete |
HardwareComponentInterface copy constructor is actively deleted.
Hardware interfaces have unique ownership and thus can't be copied in order to avoid failed or simultaneous access to hardware.
|
virtual |
Define custom node options for the hardware component interface.
Method used by the hardware component to instantiate the Lifecycle node of the hardware component upon loading the hardware component.
| void hardware_interface::HardwareComponentInterface::enable_introspection | ( | bool | enable | ) |
Enable or disable introspection of the hardware.
| [in] | enable | Enable introspection if true, disable otherwise. |
|
virtual |
Exports all command interfaces for this hardware interface.
Old way of exporting the CommandInterfaces. If a empty vector is returned then the on_export_command_interfaces() method is called. If a vector with CommandInterfaces is returned then the exporting of the CommandInterfaces is only done with this function and the ownership is transferred to the resource manager. The set_command(...), get_command(...), ..., can then not be used.
Note the ownership over the state interfaces is transferred to the caller.
Reimplemented in gazebo_ros2_control::GazeboSystem, gz_ros2_control::GazeboSimSystem, gz_ros2_control_demos::GazeboCustomSimSystem, and mujoco_ros2_control::MujocoSystemInterface.
|
virtual |
Exports all state interfaces for this hardware interface.
Old way of exporting the StateInterfaces. If a empty vector is returned then the on_export_state_interfaces() method is called. If a vector with StateInterfaces is returned then the exporting of the StateInterfaces is only done with this function and the ownership is transferred to the resource manager. The set_command(...), get_command(...), ..., can then not be used.
Note the ownership over the state interfaces is transferred to the caller.
Reimplemented in gazebo_ros2_control::GazeboSystem, gz_ros2_control::GazeboSimSystem, gz_ros2_control_demos::GazeboCustomSimSystem, and mujoco_ros2_control::MujocoSystemInterface.
|
virtual |
Override this method to export custom CommandInterfaces which are not defined in the URDF file. Those interfaces will be added to the unlisted_command_interfaces_ map.
Reimplemented in mock_components::GenericSystem.
|
virtual |
Override this method to export custom StateInterfaces which are not defined in the URDF file. Those interfaces will be added to the unlisted_state_interfaces_ map.
|
virtual |
Get the clock.
|
inline |
| T | The type of the value to be retrieved. |
| [in] | interface_handle | The shared pointer to the command interface to access. |
| [out] | command | The variable to store the retrieved value. |
| [in] | wait_until_get | If true, the method ensures that the value is retrieved successfully |
| std::runtime_error | This method throws a runtime error if it cannot access the command interface or its stored value, when wait_until_get is true. |
|
inline |
Get the value from a command interface.
| T | The type of the value to be retrieved. |
| [in] | interface_name | The name of the command interface to access. |
| std::runtime_error | This method throws a runtime error if it cannot access the command interface or its stored value. |
|
virtual |
Get the command interface handle.
| [in] | interface_name | The name of the command interface to access. |
| std::runtime_error | This method throws a runtime error if it cannot find the command interface with the given name. |
| const std::string & hardware_interface::HardwareComponentInterface::get_group_name | ( | ) | const |
Get name of the hardware group to which it belongs to.
| const HardwareInfo & hardware_interface::HardwareComponentInterface::get_hardware_info | ( | ) | const |
Get the hardware info of the HardwareComponentInterface.
| const rclcpp_lifecycle::State & hardware_interface::HardwareComponentInterface::get_lifecycle_state | ( | ) | const |
Get life-cycle state of the hardware.
|
virtual |
Get the logger of the HardwareComponentInterface.
Reimplemented in mujoco_ros2_control::MujocoSystemInterface.
| const std::string & hardware_interface::HardwareComponentInterface::get_name | ( | ) | const |
Get name of the hardware.
|
virtual |
Get the default node of the HardwareComponentInterface.
|
inline |
| T | The type of the value to be retrieved. |
| [in] | interface_handle | The shared pointer to the state interface to access. |
| [out] | state | The variable to store the retrieved value. |
| [in] | wait_until_get | If true, the method ensures that the value is retrieved successfully |
| std::runtime_error | This method throws a runtime error if it cannot access the state interface or its stored value, when wait_until_get is true. |
|
inline |
Get the value from a state interface.
| T | The type of the value to be retrieved. |
| [in] | interface_name | The name of the state interface to access. |
| std::runtime_error | This method throws a runtime error if it cannot access the state interface or its stored value. |
|
virtual |
Get the state interface handle.
| [in] | interface_name | The name of the state interface to access. |
| std::runtime_error | This method throws a runtime error if it cannot find the state interface with the given name. |
|
virtual |
Does the command interface exist?
| [in] | interface_name | The name of the command interface. |
|
virtual |
Does the state interface exist?
| [in] | interface_name | The name of the state interface. |
| CallbackReturn hardware_interface::HardwareComponentInterface::init | ( | const hardware_interface::HardwareComponentParams & | params | ) |
Initialization of the hardware interface from data parsed from the robot's URDF and also the clock and logger interfaces.
| [in] | params | A struct of type HardwareComponentParams containing all necessary parameters for initializing this specific hardware component, including its HardwareInfo, a dedicated logger, a clock, and a weak_ptr to the executor. |
cancel() or use blocking callbacks such as spin().
|
inline |
Initialization of the hardware interface from data parsed from the robot's URDF and also the clock and logger interfaces.
| [in] | hardware_info | structure with data from URDF. |
| [in] | clock | pointer to the resource manager clock. |
| [in] | logger | Logger for the hardware component. |
|
inline |
Initialization of the hardware interface from data parsed from the robot's URDF and also the clock and logger interfaces.
| [in] | hardware_info | structure with data from URDF. |
| [in] | logger | Logger for the hardware component. |
| [in] | clock_interface | pointer to the clock interface. |
|
virtual |
Default implementation for exporting the CommandInterfaces. The CommandInterfaces are created according to the InterfaceDescription. The memory accessed by the controllers and hardware is assigned here and resides in the system_interface.
Actuator and System components should override this method. Sensor components can use the default.
Reimplemented in hardware_interface::SensorInterface.
|
virtual |
Default implementation for exporting the StateInterfaces. The StateInterfaces are created according to the InterfaceDescription. The memory accessed by the controllers and hardware is assigned here and resides in the interface.
|
virtual |
Initialization of the hardware interface from data parsed from the robot's URDF.
| [in] | params | A struct of type hardware_interface::HardwareComponentInterfaceParams containing all necessary parameters for initializing this specific hardware component, specifically its HardwareInfo, and a weak_ptr to the executor. |
cancel() or use blocking callbacks such as spin(). Reimplemented in gz_ros2_control_demos::GazeboCustomSimSystem, mock_components::GenericSystem, ros2_control_demo_example_1::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_10::RRBotSystemWithGPIOHardware, ros2_control_demo_example_11::CarlikeBotSystemHardware, ros2_control_demo_example_12::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_14::RRBotActuatorWithoutFeedback, ros2_control_demo_example_14::RRBotSensorPositionFeedback, ros2_control_demo_example_16::DiffBotSystemHardware, ros2_control_demo_example_17::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_2::DiffBotSystemHardware, ros2_control_demo_example_3::RRBotSystemMultiInterfaceHardware, ros2_control_demo_example_4::RRBotSystemWithSensorHardware, ros2_control_demo_example_5::ExternalRRBotForceTorqueSensorHardware, ros2_control_demo_example_5::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_6::RRBotModularJoint, ros2_control_demo_example_7::RobotSystem, ros2_control_demo_example_8::RRBotTransmissionsSystemPositionOnlyHardware, ros2_control_demo_example_9::RRBotSystemPositionOnlyHardware, cm_topic_hardware_component::CMTopicSystem, and joint_state_topic_hardware_interface::JointStateTopicSystem.
|
virtual |
Initialization of the hardware interface from data parsed from the robot's URDF.
| [in] | hardware_info | structure with data from URDF. |
Reimplemented in mujoco_ros2_control::MujocoSystemInterface, gazebo_ros2_control::GazeboSystem, and gz_ros2_control::GazeboSimSystem.
| void hardware_interface::HardwareComponentInterface::pause_async_operations | ( | ) |
Pause any asynchronous operations.
This method is called to pause any ongoing asynchronous operations, such as read/write cycles. It is typically used during lifecycle transitions or when the hardware needs to be paused.
|
virtual |
Perform the mode-switching for the new command interface combination.
| [in] | start_interfaces | vector of string identifiers for the command interfaces starting. |
| [in] | stop_interfaces | vector of string identifiers for the command interfaces stopping. |
Reimplemented in gazebo_ros2_control::GazeboSystem, gz_ros2_control::GazeboSimSystem, mujoco_ros2_control::MujocoSystemInterface, and mock_components::GenericSystem.
|
virtual |
Prepare for a new command interface switch.
Prepare for any mode-switching required by the new command interface combination.
| [in] | start_interfaces | vector of string identifiers for the command interfaces starting. |
| [in] | stop_interfaces | vector of string identifiers for the command interfaces stopping. |
Reimplemented in mock_components::GenericSystem, and ros2_control_demo_example_3::RRBotSystemMultiInterfaceHardware.
| void hardware_interface::HardwareComponentInterface::prepare_for_activation | ( | ) |
Prepare for the activation of the hardware.
This method is called before the hardware is activated by the resource manager.
|
pure virtual |
Read the current state values from the hardware.
The data readings from the physical hardware has to be updated and reflected accordingly in the exported state interfaces. That is, the data pointed by the interfaces shall be updated.
| [in] | time | The time at the start of this control loop iteration |
| [in] | period | The measured time taken by the last control loop iteration |
Implemented in gazebo_ros2_control::GazeboSystem, gz_ros2_control::GazeboSimSystem, gz_ros2_control_demos::GazeboCustomSimSystem, mujoco_ros2_control::MujocoSystemInterface, mock_components::GenericSystem, ros2_control_demo_example_1::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_10::RRBotSystemWithGPIOHardware, ros2_control_demo_example_11::CarlikeBotSystemHardware, ros2_control_demo_example_12::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_14::RRBotActuatorWithoutFeedback, ros2_control_demo_example_14::RRBotSensorPositionFeedback, ros2_control_demo_example_16::DiffBotSystemHardware, ros2_control_demo_example_17::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_2::DiffBotSystemHardware, ros2_control_demo_example_3::RRBotSystemMultiInterfaceHardware, ros2_control_demo_example_4::RRBotSystemWithSensorHardware, ros2_control_demo_example_5::ExternalRRBotForceTorqueSensorHardware, ros2_control_demo_example_5::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_6::RRBotModularJoint, ros2_control_demo_example_7::RobotSystem, ros2_control_demo_example_8::RRBotTransmissionsSystemPositionOnlyHardware, ros2_control_demo_example_9::RRBotSystemPositionOnlyHardware, cm_topic_hardware_component::CMTopicSystem, and joint_state_topic_hardware_interface::JointStateTopicSystem.
|
inline |
Set the value of a command interface.
| T | The type of the value to be stored. |
| interface_handle | The shared pointer to the command interface to access. |
| value | The value to store. |
| wait_until_set | If true, the method ensures that the value is set successfully |
| This | method throws a runtime error if it cannot access the command interface. |
|
inline |
Set the value of a command interface.
| T | The type of the value to be stored. |
| interface_name | The name of the command interface to access. |
| value | The value to store. |
| This | method throws a runtime error if it cannot access the command interface. |
| void hardware_interface::HardwareComponentInterface::set_lifecycle_state | ( | const rclcpp_lifecycle::State & | new_state | ) |
Set life-cycle state of the hardware.
Get the lifecycle id of the hardware component interface that is cached internally to avoid calls to get_lifecycle_state() in the real-time control loop.
|
inline |
Set the value of a state interface.
| T | The type of the value to be stored. |
| interface_handle | The shared pointer to the state interface to access. |
| value | The value to store. |
| wait_until_set | If true, the method ensures that the value is set successfully |
| std::runtime_error | This method throws a runtime error if it cannot access the state interface. |
|
inline |
Set the value of a state interface.
| T | The type of the value to be stored. |
| [in] | interface_name | The name of the state interface to access. |
| [in] | value | The value to store. |
| std::runtime_error | This method throws a runtime error if it cannot access the state interface. |
| void hardware_interface::HardwareComponentInterface::stop_async_handler | ( | ) |
Stop and release the async handler thread.
Joins the async worker thread and destroys the handler.
| HardwareComponentCycleStatus hardware_interface::HardwareComponentInterface::trigger_read | ( | const rclcpp::Time & | time, |
| const rclcpp::Duration & | period | ||
| ) |
Triggers the read method synchronously or asynchronously depending on the HardwareInfo.
The data readings from the physical hardware has to be updated and reflected accordingly in the exported state interfaces. That is, the data pointed by the interfaces shall be updated. The method is called in the resource_manager's read loop
| [in] | time | The time at the start of this control loop iteration |
| [in] | period | The measured time taken by the last control loop iteration |
| HardwareComponentCycleStatus hardware_interface::HardwareComponentInterface::trigger_write | ( | const rclcpp::Time & | time, |
| const rclcpp::Duration & | period | ||
| ) |
Triggers the write method synchronously or asynchronously depending on the HardwareInfo.
The physical hardware shall be updated with the latest value from the exported command interfaces. The method is called in the resource_manager's write loop
| [in] | time | The time at the start of this control loop iteration |
| [in] | period | The measured time taken by the last control loop iteration |
|
virtual |
Write the current command values to the hardware.
The physical hardware shall be updated with the latest value from the exported command interfaces.
| [in] | time | The time at the start of this control loop iteration |
| [in] | period | The measured time taken by the last control loop iteration |
Reimplemented in hardware_interface::SensorInterface, mock_components::GenericSystem, ros2_control_demo_example_7::RobotSystem, cm_topic_hardware_component::CMTopicSystem, joint_state_topic_hardware_interface::JointStateTopicSystem, gazebo_ros2_control::GazeboSystem, gz_ros2_control::GazeboSimSystem, gz_ros2_control_demos::GazeboCustomSimSystem, mujoco_ros2_control::MujocoSystemInterface, ros2_control_demo_example_1::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_10::RRBotSystemWithGPIOHardware, ros2_control_demo_example_11::CarlikeBotSystemHardware, ros2_control_demo_example_12::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_14::RRBotActuatorWithoutFeedback, ros2_control_demo_example_16::DiffBotSystemHardware, ros2_control_demo_example_17::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_2::DiffBotSystemHardware, ros2_control_demo_example_3::RRBotSystemMultiInterfaceHardware, ros2_control_demo_example_4::RRBotSystemWithSensorHardware, ros2_control_demo_example_5::RRBotSystemPositionOnlyHardware, ros2_control_demo_example_6::RRBotModularJoint, ros2_control_demo_example_8::RRBotTransmissionsSystemPositionOnlyHardware, ros2_control_demo_example_9::RRBotSystemPositionOnlyHardware, hardware_interface::ActuatorInterface, and hardware_interface::SystemInterface.