|
ros2_control - galactic
|
Loading...
Searching...
No Matches
|
ros2_control - galactic
|
Classes | |
| struct | OdometryParams |
| struct | WheelHandle |
| struct | WheelParams |
Public Member Functions | |
| DIFF_DRIVE_CONTROLLER_PUBLIC controller_interface::InterfaceConfiguration | command_interface_configuration () const override |
| DIFF_DRIVE_CONTROLLER_PUBLIC controller_interface::InterfaceConfiguration | state_interface_configuration () const override |
| DIFF_DRIVE_CONTROLLER_PUBLIC controller_interface::return_type | update (const rclcpp::Time &time, const rclcpp::Duration &period) override |
| DIFF_DRIVE_CONTROLLER_PUBLIC CallbackReturn | on_init () override |
| DIFF_DRIVE_CONTROLLER_PUBLIC CallbackReturn | on_configure (const rclcpp_lifecycle::State &previous_state) override |
| DIFF_DRIVE_CONTROLLER_PUBLIC CallbackReturn | on_activate (const rclcpp_lifecycle::State &previous_state) override |
| DIFF_DRIVE_CONTROLLER_PUBLIC CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &previous_state) override |
| DIFF_DRIVE_CONTROLLER_PUBLIC CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &previous_state) override |
| DIFF_DRIVE_CONTROLLER_PUBLIC CallbackReturn | on_error (const rclcpp_lifecycle::State &previous_state) override |
| DIFF_DRIVE_CONTROLLER_PUBLIC CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &previous_state) override |
 Public Member Functions inherited from controller_interface::ControllerInterface Public Member Functions inherited from controller_interface::ControllerInterface | |
| CONTROLLER_INTERFACE_PUBLIC void | assign_interfaces (std::vector< hardware_interface::LoanedCommandInterface > &&command_interfaces, std::vector< hardware_interface::LoanedStateInterface > &&state_interfaces) |
| CONTROLLER_INTERFACE_PUBLIC void | release_interfaces () |
| virtual CONTROLLER_INTERFACE_PUBLIC return_type | init (const std::string &controller_name) |
| CONTROLLER_INTERFACE_PUBLIC std::shared_ptr< rclcpp::Node > | get_node () |
| template<typename ParameterT > | |
| auto | auto_declare (const std::string &name, const ParameterT &default_value) |
| Declare and initialize a parameter with a type. | |
| CONTROLLER_INTERFACE_PUBLIC const rclcpp_lifecycle::State & | configure () |
| CONTROLLER_INTERFACE_PUBLIC const rclcpp_lifecycle::State & | cleanup () |
| CONTROLLER_INTERFACE_PUBLIC const rclcpp_lifecycle::State & | deactivate () |
| CONTROLLER_INTERFACE_PUBLIC const rclcpp_lifecycle::State & | activate () |
| CONTROLLER_INTERFACE_PUBLIC const rclcpp_lifecycle::State & | shutdown () |
| CONTROLLER_INTERFACE_PUBLIC const rclcpp_lifecycle::State & | get_state () const |
| CONTROLLER_INTERFACE_PUBLIC unsigned int | get_update_rate () const |
Protected Member Functions | |
| const char * | feedback_type () const |
| CallbackReturn | configure_side (const std::string &side, const std::vector< std::string > &wheel_names, std::vector< WheelHandle > ®istered_handles) |
| bool | reset () |
| void | halt () |
Protected Attributes | |
| std::vector< std::string > | left_wheel_names_ |
| std::vector< std::string > | right_wheel_names_ |
| std::vector< WheelHandle > | registered_left_wheel_handles_ |
| std::vector< WheelHandle > | registered_right_wheel_handles_ |
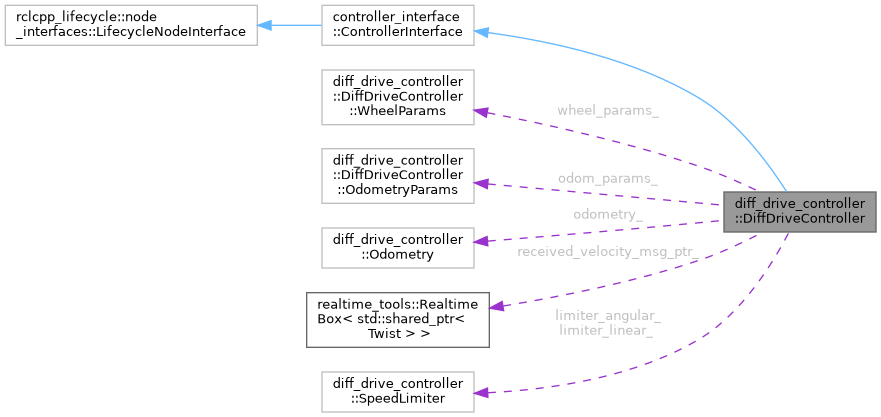
| struct diff_drive_controller::DiffDriveController::WheelParams | wheel_params_ |
| struct diff_drive_controller::DiffDriveController::OdometryParams | odom_params_ |
| Odometry | odometry_ |
| std::shared_ptr< rclcpp::Publisher< nav_msgs::msg::Odometry > > | odometry_publisher_ = nullptr |
| std::shared_ptr< realtime_tools::RealtimePublisher< nav_msgs::msg::Odometry > > | realtime_odometry_publisher_ = nullptr |
| std::shared_ptr< rclcpp::Publisher< tf2_msgs::msg::TFMessage > > | odometry_transform_publisher_ |
| std::shared_ptr< realtime_tools::RealtimePublisher< tf2_msgs::msg::TFMessage > > | realtime_odometry_transform_publisher_ = nullptr |
| std::chrono::milliseconds | cmd_vel_timeout_ {500} |
| bool | subscriber_is_active_ = false |
| rclcpp::Subscription< Twist >::SharedPtr | velocity_command_subscriber_ = nullptr |
| rclcpp::Subscription< geometry_msgs::msg::Twist >::SharedPtr | velocity_command_unstamped_subscriber_ = nullptr |
| realtime_tools::RealtimeBox< std::shared_ptr< Twist > > | received_velocity_msg_ptr_ {nullptr} |
| std::queue< Twist > | previous_commands_ |
| SpeedLimiter | limiter_linear_ |
| SpeedLimiter | limiter_angular_ |
| bool | publish_limited_velocity_ = false |
| std::shared_ptr< rclcpp::Publisher< Twist > > | limited_velocity_publisher_ = nullptr |
| std::shared_ptr< realtime_tools::RealtimePublisher< Twist > > | realtime_limited_velocity_publisher_ |
| rclcpp::Time | previous_update_timestamp_ {0} |
| double | publish_rate_ = 50.0 |
| rclcpp::Duration | publish_period_ = rclcpp::Duration::from_nanoseconds(0) |
| rclcpp::Time | previous_publish_timestamp_ {0} |
| bool | is_halted = false |
| bool | use_stamped_vel_ = true |
| Protected Attributes inherited from controller_interface::ControllerInterface | |
| std::vector< hardware_interface::LoanedCommandInterface > | command_interfaces_ |
| std::vector< hardware_interface::LoanedStateInterface > | state_interfaces_ |
| std::shared_ptr< rclcpp::Node > | node_ |
| rclcpp_lifecycle::State | lifecycle_state_ |
| unsigned int | update_rate_ = 0 |
|
overridevirtual |
Implements controller_interface::ControllerInterface.
|
overridevirtual |
Implements controller_interface::ControllerInterface.
|
overridevirtual |
Implements controller_interface::ControllerInterface.
|
overridevirtual |
Implements controller_interface::ControllerInterface.
|
protected |
|
protected |