|
ros2_control - humble
|
Loading...
Searching...
No Matches
|
ros2_control - humble
|
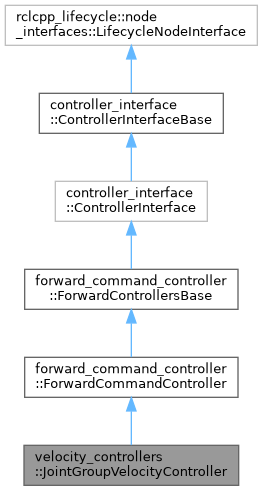
Forward command controller for a set of velocity controlled joints (linear or angular). More...
#include <joint_group_velocity_controller.hpp>

Public Member Functions | |
| VELOCITY_CONTROLLERS_PUBLIC controller_interface::CallbackReturn | on_init () override |
| Extending interface with initialization method which is individual for each controller. | |
| VELOCITY_CONTROLLERS_PUBLIC controller_interface::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &previous_state) override |
 Public Member Functions inherited from forward_command_controller::ForwardControllersBase Public Member Functions inherited from forward_command_controller::ForwardControllersBase | |
| FORWARD_COMMAND_CONTROLLER_PUBLIC controller_interface::InterfaceConfiguration | command_interface_configuration () const override |
| Get configuration for controller's required command interfaces. | |
| FORWARD_COMMAND_CONTROLLER_PUBLIC controller_interface::InterfaceConfiguration | state_interface_configuration () const override |
| Get configuration for controller's required state interfaces. | |
| FORWARD_COMMAND_CONTROLLER_PUBLIC controller_interface::CallbackReturn | on_configure (const rclcpp_lifecycle::State &previous_state) override |
| FORWARD_COMMAND_CONTROLLER_PUBLIC controller_interface::CallbackReturn | on_activate (const rclcpp_lifecycle::State &previous_state) override |
| FORWARD_COMMAND_CONTROLLER_PUBLIC controller_interface::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &previous_state) override |
| FORWARD_COMMAND_CONTROLLER_PUBLIC controller_interface::return_type | update (const rclcpp::Time &time, const rclcpp::Duration &period) override |
| Public Member Functions inherited from controller_interface::ControllerInterface | |
| CONTROLLER_INTERFACE_PUBLIC bool | is_chainable () const final |
| CONTROLLER_INTERFACE_PUBLIC std::vector< hardware_interface::CommandInterface > | export_reference_interfaces () final |
| CONTROLLER_INTERFACE_PUBLIC bool | set_chained_mode (bool chained_mode) final |
| CONTROLLER_INTERFACE_PUBLIC bool | is_in_chained_mode () const final |
| Public Member Functions inherited from controller_interface::ControllerInterfaceBase | |
| CONTROLLER_INTERFACE_PUBLIC void | assign_interfaces (std::vector< hardware_interface::LoanedCommandInterface > &&command_interfaces, std::vector< hardware_interface::LoanedStateInterface > &&state_interfaces) |
| CONTROLLER_INTERFACE_PUBLIC void | release_interfaces () |
| virtual CONTROLLER_INTERFACE_PUBLIC return_type | init (const std::string &controller_name, const std::string &namespace_="", const rclcpp::NodeOptions &node_options=rclcpp::NodeOptions() .allow_undeclared_parameters(true) .automatically_declare_parameters_from_overrides(true)) |
| CONTROLLER_INTERFACE_PUBLIC const rclcpp_lifecycle::State & | configure () |
| Custom configure method to read additional parameters for controller-nodes. | |
| CONTROLLER_INTERFACE_PUBLIC std::shared_ptr< rclcpp_lifecycle::LifecycleNode > | get_node () |
| CONTROLLER_INTERFACE_PUBLIC std::shared_ptr< rclcpp_lifecycle::LifecycleNode > | get_node () const |
| CONTROLLER_INTERFACE_PUBLIC const rclcpp_lifecycle::State & | get_state () const |
| CONTROLLER_INTERFACE_PUBLIC unsigned int | get_update_rate () const |
| template<typename ParameterT > | |
| auto | auto_declare (const std::string &name, const ParameterT &default_value) |
| Declare and initialize a parameter with a type. | |
Additional Inherited Members | |
| Protected Member Functions inherited from forward_command_controller::ForwardCommandController | |
| void | declare_parameters () override |
| controller_interface::CallbackReturn | read_parameters () override |
| Protected Attributes inherited from forward_command_controller::ForwardCommandController | |
| std::shared_ptr< ParamListener > | param_listener_ |
| Params | params_ |
| Protected Attributes inherited from forward_command_controller::ForwardControllersBase | |
| std::vector< std::string > | joint_names_ |
| std::string | interface_name_ |
| std::vector< std::string > | command_interface_types_ |
| realtime_tools::RealtimeBuffer< std::shared_ptr< CmdType > > | rt_command_ptr_ |
| rclcpp::Subscription< CmdType >::SharedPtr | joints_command_subscriber_ |
| Protected Attributes inherited from controller_interface::ControllerInterfaceBase | |
| std::vector< hardware_interface::LoanedCommandInterface > | command_interfaces_ |
| std::vector< hardware_interface::LoanedStateInterface > | state_interfaces_ |
| unsigned int | update_rate_ = 0 |
Forward command controller for a set of velocity controlled joints (linear or angular).
This class forwards the commanded velocities down to a set of joints.
| joints | Names of the joints to control. |
Subscribes to:
|
overridevirtual |
Extending interface with initialization method which is individual for each controller.
Reimplemented from forward_command_controller::ForwardControllersBase.