You're reading the documentation for a version of ROS 2 that has reached its EOL (end-of-life), and is no longer officially supported. If you want up-to-date information, please have a look at Kilted.
Controller Manager
Controller Manager is the main component in the ros2_control framework. It manages lifecycle of controllers, access to the hardware interfaces and offers services to the ROS-world.
Determinism
For best performance when controlling hardware you want the controller manager to have as little jitter as possible in the main control loop. The normal linux kernel is optimized for computational throughput and therefore is not well suited for hardware control. The two easiest kernel options are the Real-time Ubuntu 22.04 LTS Beta or linux-image-rt-amd64 on Debian Bullseye.
If you have a realtime kernel installed, the main thread of Controller Manager attempts to configure SCHED_FIFO with a priority of 50.
By default, the user does not have permission to set such a high priority.
To give the user such permissions, add a group named realtime and add the user controlling your robot to this group:
$ sudo addgroup realtime
$ sudo usermod -a -G realtime $(whoami)
Afterwards, add the following limits to the realtime group in /etc/security/limits.conf:
@realtime soft rtprio 99
@realtime soft priority 99
@realtime soft memlock 102400
@realtime hard rtprio 99
@realtime hard priority 99
@realtime hard memlock 102400
The limits will be applied after you log out and in again.
Parameters
- hardware_components_initial_state
Map of parameters for controlled lifecycle management of hardware components. The names of the components are defined as attribute of
<ros2_control>-tag inrobot_description. Hardware components found inrobot_description, but without explicit state definition will be immediately activated. Detailed explanation of each parameter is given below. The full structure of the map is given in the following example:
hardware_components_initial_state:
unconfigured:
- "arm1"
- "arm2"
inactive:
- "base3"
- hardware_components_initial_state.unconfigured (optional; list<string>; default: empty)
Defines which hardware components will be only loaded immediately when controller manager is started.
- hardware_components_initial_state.inactive (optional; list<string>; default: empty)
Defines which hardware components will be configured immediately when controller manager is started.
- robot_description (mandatory; string)
String with the URDF string as robot description. This is usually result of the parsed description files by
xacrocommand.- update_rate (mandatory; integer)
The frequency of controller manager’s real-time update loop. This loop reads states from hardware, updates controller and writes commands to hardware.
- <controller_name>.type
Name of a plugin exported using
pluginlibfor a controller. This is a class from which controller’s instance with name “controller_name” is created.
Helper scripts
There are two scripts to interact with controller manager from launch files:
spawner- loads, configures and start a controller on startup.
unspawner- stops and unloads a controller.
hardware_spawner- activates and configures a hardware component.
spawner
$ ros2 run controller_manager spawner -h
usage: spawner [-h] [-c CONTROLLER_MANAGER] [-p PARAM_FILE] [-n NAMESPACE] [--load-only] [--inactive] [-t CONTROLLER_TYPE] [-u]
[--controller-manager-timeout CONTROLLER_MANAGER_TIMEOUT]
controller_name
positional arguments:
controller_name Name of the controller
options:
-h, --help show this help message and exit
-c CONTROLLER_MANAGER, --controller-manager CONTROLLER_MANAGER
Name of the controller manager ROS node
-p PARAM_FILE, --param-file PARAM_FILE
Controller param file to be loaded into controller node before configure
-n NAMESPACE, --namespace NAMESPACE
Namespace for the controller
--load-only Only load the controller and leave unconfigured.
--inactive Load and configure the controller, however do not activate them
-t CONTROLLER_TYPE, --controller-type CONTROLLER_TYPE
If not provided it should exist in the controller manager namespace
-u, --unload-on-kill Wait until this application is interrupted and unload controller
--controller-manager-timeout CONTROLLER_MANAGER_TIMEOUT
Time to wait for the controller manager
The parsed controller config file can follow the same conventions as the typical ROS 2 parameter file format. Now, the spawner can handle config files with wildcard entries and also the controller name in the absolute namespace. See the following examples on the config files:
/**/position_trajectory_controller: ros__parameters: type: joint_trajectory_controller/JointTrajectoryController joints: - joint1 - joint2 command_interfaces: - position ...../position_trajectory_controller: ros__parameters: type: joint_trajectory_controller/JointTrajectoryController joints: - joint1 - joint2 command_interfaces: - position .....position_trajectory_controller: ros__parameters: type: joint_trajectory_controller/JointTrajectoryController joints: - joint1 - joint2 command_interfaces: - position ...../rrbot_1/position_trajectory_controller: ros__parameters: type: joint_trajectory_controller/JointTrajectoryController joints: - joint1 - joint2 command_interfaces: - position .....
unspawner
$ ros2 run controller_manager unspawner -h
usage: unspawner [-h] [-c CONTROLLER_MANAGER] controller_name
positional arguments:
controller_name Name of the controller
optional arguments:
-h, --help show this help message and exit
-c CONTROLLER_MANAGER, --controller-manager CONTROLLER_MANAGER
Name of the controller manager ROS node
hardware_spawner
$ ros2 run controller_manager hardware_spawner -h
usage: hardware_spawner [-h] [-c CONTROLLER_MANAGER] [--controller-manager-timeout CONTROLLER_MANAGER_TIMEOUT]
(--activate | --configure)
hardware_component_names [hardware_component_names ...]
positional arguments:
hardware_component_names
The name of the hardware components which should be activated.
options:
-h, --help show this help message and exit
-c CONTROLLER_MANAGER, --controller-manager CONTROLLER_MANAGER
Name of the controller manager ROS node
--controller-manager-timeout CONTROLLER_MANAGER_TIMEOUT
Time to wait for the controller manager
--activate Activates the given components. Note: Components are by default configured before activated.
--configure Configures the given components.
rqt_controller_manager
A GUI tool to interact with the controller manager services to be able to switch the lifecycle states of the controllers as well as the hardware components.
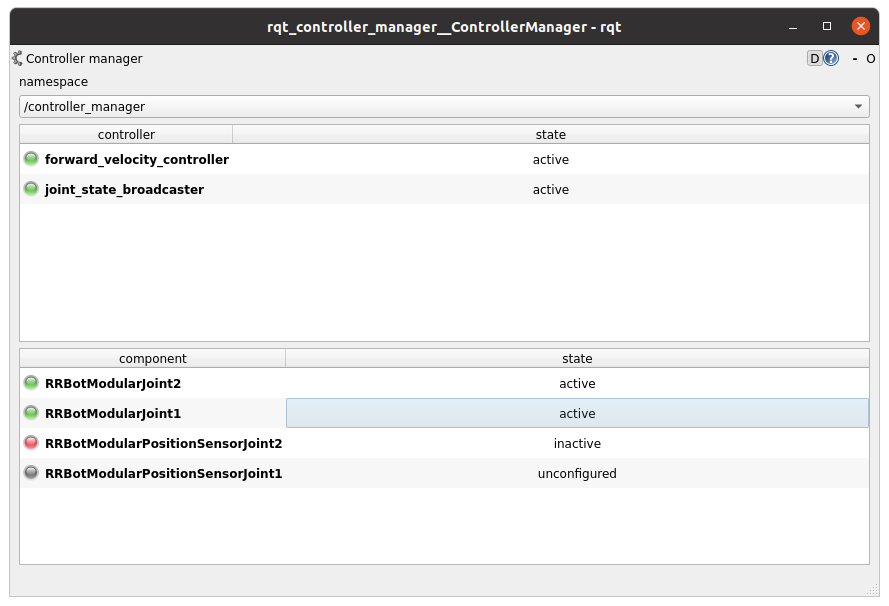
It can be launched independently using the following command or as rqt plugin.
ros2 run rqt_controller_manager rqt_controller_manager
* Double-click on a controller or hardware component to show the additional info.
* Right-click on a controller or hardware component to show a context menu with options for lifecycle management.
Using the Controller Manager in a Process
The ControllerManager may also be instantiated in a process as a class, but proper care must be taken when doing so.
The reason for this is because the ControllerManager class inherits from rclcpp::Node.
If there is more than one Node in the process, global node name remap rules can forcibly change the ControllerManager's node name as well, leading to duplicate node names.
This occurs whether the Nodes are siblings or exist in a hierarchy.
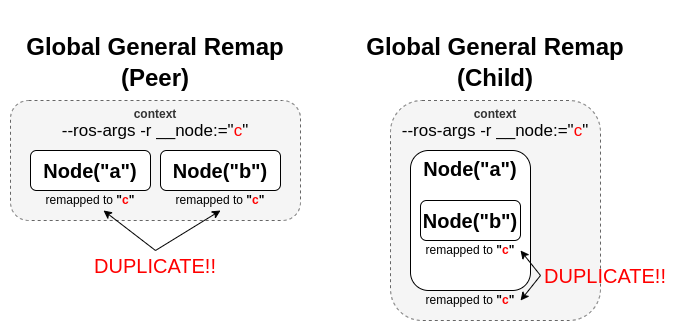
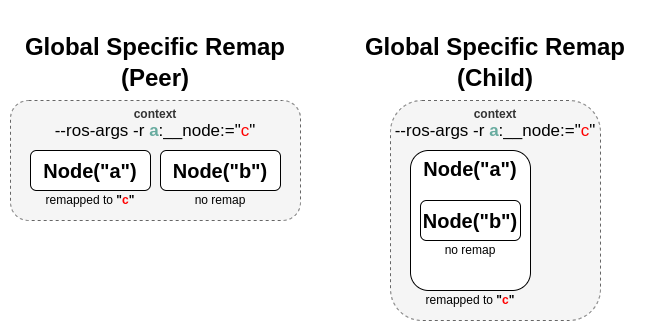
The workaround for this is to specify another node name remap rule in the NodeOptions passed to the ControllerManager node (causing it to ignore the global rule), or ensure that any remap rules are targeted to specific nodes.
auto options = controller_manager::get_cm_node_options();
options.arguments({
"--ros-args",
"--remap", "_target_node_name:__node:=dst_node_name",
"--log-level", "info"});
auto cm = std::make_shared<controller_manager::ControllerManager>(
executor, "_target_node_name", "some_optional_namespace", options);
Concepts
Restarting all controllers
The simplest way to restart all controllers is by using switch_controllers services or CLI and adding all controllers to start and stop lists.
Note that not all controllers have to be restarted, e.g., broadcasters.
Restarting hardware
If hardware gets restarted then you should go through its lifecycle again.
This can be simply achieved by returning ERROR from write and read methods of interface implementation.
NOT IMPLEMENTED YET - PLEASE STOP/RESTART ALL CONTROLLERS MANUALLY FOR NOW The controller manager detects that and stops all the controllers that are commanding that hardware and restarts broadcasters that are listening to its states.