rqt_joint_trajectory_controller
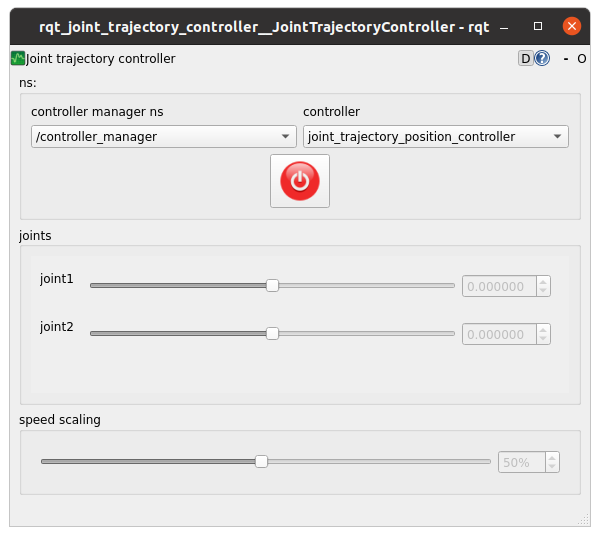
rqt_joint_trajectory_controller is a GUI plugin for rqt that allows to command a joint_trajectory_controller.
rqt_joint_trajectory_controller is a GUI plugin for rqt that allows to command a joint_trajectory_controller.