|
|
| AdmittanceRule (const std::shared_ptr< admittance_controller::ParamListener > ¶meter_handler) |
| |
| controller_interface::return_type | configure (const std::shared_ptr< rclcpp_lifecycle::LifecycleNode > &node, const size_t num_joint, const std::string &robot_description) |
| | Configure admittance rule memory using number of joints.
|
| |
|
controller_interface::return_type | reset (const size_t num_joints) |
| | Reset all values back to default.
|
| |
| void | apply_parameters_update () |
| |
| controller_interface::return_type | update (const trajectory_msgs::msg::JointTrajectoryPoint ¤t_joint_state, const geometry_msgs::msg::Wrench &measured_wrench, const trajectory_msgs::msg::JointTrajectoryPoint &reference_joint_state, const rclcpp::Duration &period, trajectory_msgs::msg::JointTrajectoryPoint &desired_joint_states) |
| |
| const control_msgs::msg::AdmittanceControllerState & | get_controller_state () |
| |
|
|
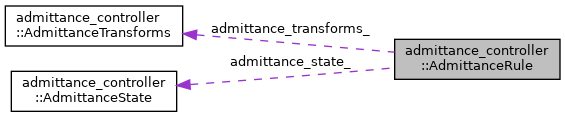
std::shared_ptr< admittance_controller::ParamListener > | parameter_handler_ |
| |
|
admittance_controller::Params | parameters_ |
| |
|
| bool | calculate_admittance_rule (AdmittanceState &admittance_state, double dt) |
| |
| void | process_wrench_measurements (const geometry_msgs::msg::Wrench &measured_wrench, const Eigen::Matrix< double, 3, 3 > &sensor_world_rot, const Eigen::Matrix< double, 3, 3 > &cog_world_rot) |
| |
|
template<typename T1 , typename T2 > |
| void | vec_to_eigen (const std::vector< T1 > &data, T2 &matrix) |
| |
◆ apply_parameters_update()
| void admittance_controller::AdmittanceRule::apply_parameters_update |
( |
| ) |
|
Updates parameter_ struct if any parameters have changed since last update. Parameter dependent Eigen field members (end_effector_weight_, cog_pos_, mass_, mass_inv_ stiffness, selected_axes, damping_) are also updated
◆ calculate_admittance_rule()
| bool admittance_controller::AdmittanceRule::calculate_admittance_rule |
( |
AdmittanceState & |
admittance_state, |
|
|
double |
dt |
|
) |
| |
|
protected |
Calculates the admittance rule from given the robot's current joint angles. The admittance controller state input is updated with the new calculated values. A boolean value is returned indicating if any of the kinematics plugin calls failed.
- Parameters
-
| [in] | admittance_state | contains all the information needed to calculate the admittance offset |
| [in] | dt | controller period |
| [out] | success | true if no calls to the kinematics interface fail |
◆ configure()
| controller_interface::return_type admittance_controller::AdmittanceRule::configure |
( |
const std::shared_ptr< rclcpp_lifecycle::LifecycleNode > & |
node, |
|
|
const size_t |
num_joint, |
|
|
const std::string & |
robot_description |
|
) |
| |
Configure admittance rule memory using number of joints.
Configure admittance rule memory for num joints and load kinematics interface.
◆ get_controller_state()
| const control_msgs::msg::AdmittanceControllerState & admittance_controller::AdmittanceRule::get_controller_state |
( |
| ) |
|
Set fields of state_message from current admittance controller state.
- Parameters
-
| [out] | state_message | message containing target position/vel/accel, wrench, and actual robot state, among other things |
◆ process_wrench_measurements()
| void admittance_controller::AdmittanceRule::process_wrench_measurements |
( |
const geometry_msgs::msg::Wrench & |
measured_wrench, |
|
|
const Eigen::Matrix< double, 3, 3 > & |
sensor_world_rot, |
|
|
const Eigen::Matrix< double, 3, 3 > & |
cog_world_rot |
|
) |
| |
|
protected |
Updates internal estimate of wrench in world frame wrench_world_ given the new measurement measured_wrench, the sensor to base frame rotation sensor_world_rot, and the center of gravity frame to base frame rotation cog_world_rot. The wrench_world_ estimate includes gravity compensation
- Parameters
-
| [in] | measured_wrench | most recent measured wrench from force torque sensor |
| [in] | sensor_world_rot | rotation matrix from world frame to sensor frame |
| [in] | cog_world_rot | rotation matrix from world frame to center of gravity frame |
◆ update()
| controller_interface::return_type admittance_controller::AdmittanceRule::update |
( |
const trajectory_msgs::msg::JointTrajectoryPoint & |
current_joint_state, |
|
|
const geometry_msgs::msg::Wrench & |
measured_wrench, |
|
|
const trajectory_msgs::msg::JointTrajectoryPoint & |
reference_joint_state, |
|
|
const rclcpp::Duration & |
period, |
|
|
trajectory_msgs::msg::JointTrajectoryPoint & |
desired_joint_states |
|
) |
| |
Calculate 'desired joint states' based on the 'measured force', 'reference joint state', and 'current_joint_state'.
All transforms (e.g., world to base, sensor to base, CoG to base) are now computed directly in this function and stored in admittance_state_, removing the need for an intermediate transform struct.
- Parameters
-
| [in] | current_joint_state | current joint state of the robot |
| [in] | measured_wrench | most recent measured wrench from force torque sensor |
| [in] | reference_joint_state | input joint state reference |
| [in] | period | time in seconds since last controller update |
| [out] | desired_joint_state | joint state reference after the admittance offset is applied to the input reference |
The documentation for this class was generated from the following files: