You're reading the documentation for a development version. For the latest released version, please have a look at Kilted.
rqt_joint_trajectory_controller
The rqt_joint_trajectory_controller provides an intuitive graphical way to test different joint positions and trajectories without having to manually construct complex trajectory messages or use command line interfaces.
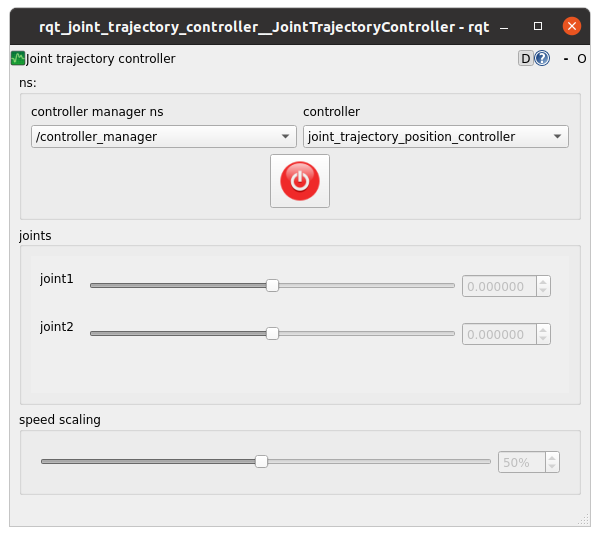
The interface allows you to:
Select the controller manager namespace and controller from dropdown menus.
Adjust target positions for joints (joint1 and joint2) using interactive sliders.
Fine-tune joint positions with precise numerical inputs.
Control the motion speed using the speed scaling slider.
Activate the trajectory execution with the central power button.
Visualize current joint configurations in real-time.